产品详情
简单介绍:
日本BL必爱路位置误差修正装置LUR-111 LUR-112 LUR-113 LUR-211
详情介绍:

- 误差修正装置(LOCK-UP RCC装置)

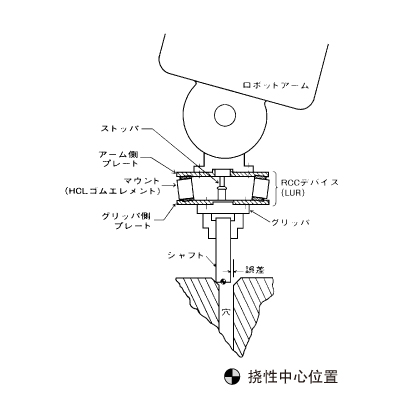


BL WRIST COMPLIANCER(机械臂定位系统)是用于机器人及专用机械进行插入作业时修正位置偏差的装置。与原来的RCC装置相比较,LOCK-UP RCC装置加装了用气压方式锁定不固定状态的机构。进行插入作业时,通过机器人及专用机械从搬运开始位置移到插入位置的移动过程中,可以LOCK-UP RCC装置的定位功能,实现更高速和加速度的运转,缩短了生产间隔时间。
- 产品资料(PDF)
误差修正装置(LOCK-UP RCC)的特点
通过误差修正橡胶元件实现统一功能
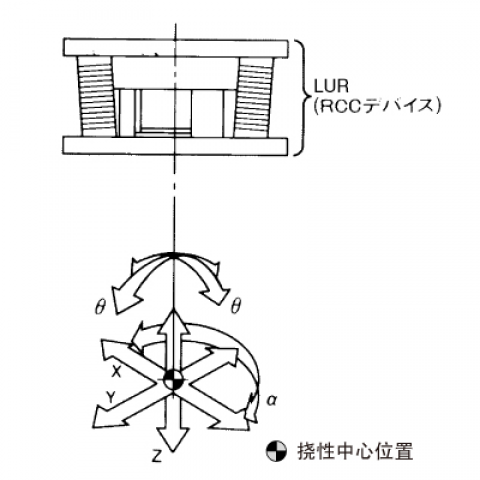
根据X·Y·Z·α·θ方向的误差修正橡胶元件有统一功能。如果在插入工作中与倒角部接触,可修正各方向的误差。
易于组装零件,实现产品质量、生产率的提高。
用于装配、插入作业等
插入到轴承的外壳 LSI检查设备(大规模集成电路) 交流发动机的装配
插入到齿轮的花键轴 印刷电路板的部件装配 汽车空调的装配
安装到铆钉 发动机阀的装配 汽车音响的装配
螺丝锁紧 自动变速机的阀的装配 人工透析机的装配
电机的装配
其他用途
飞机机身外板的磨削及去飞边 自动测量(检查)
扩孔 模具的位置调整
2、机械轴与小孔的偏差以及 其他条件的定义
位置误差修正方向・各方向的刚性
-
位置誤差修正 -
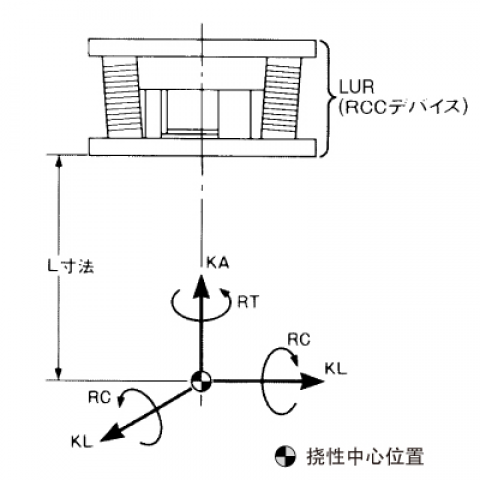
各方向剛性
挠性中心位置
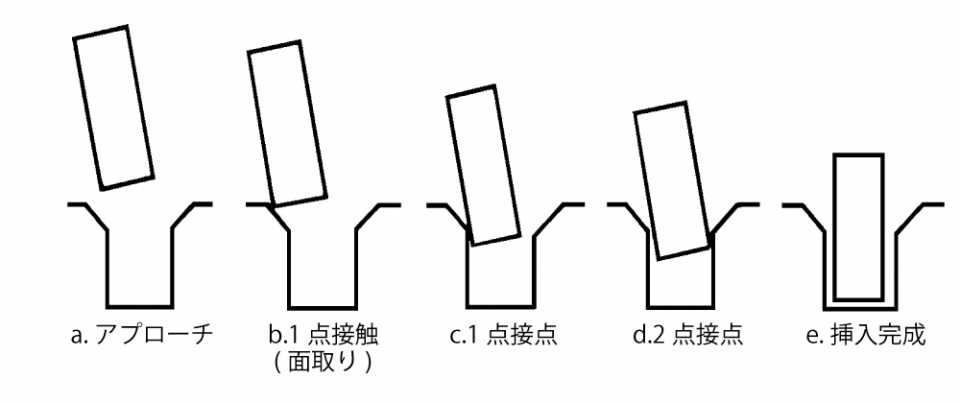
在选择产品时,横向刚性KL和角度(扭转)方向刚性Rc是尤为重要的要素。完成装配所必需的KL和Rc数值可以通过力学计算公式得到近似值。通过机械轴插入小孔的示例,可见上述要素的重要性。1、机械轴由近接小孔到完成插入作业的过程
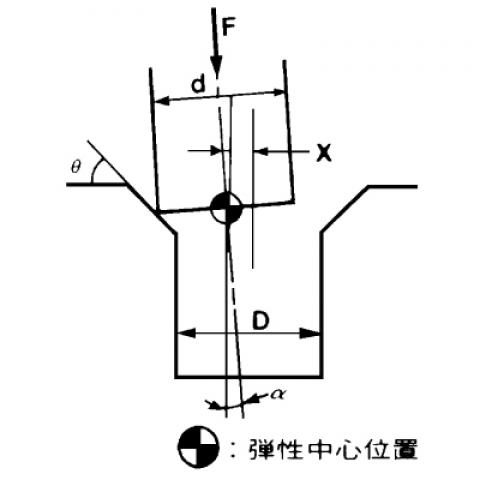
F:挿入力[kgf]
X:水平方向誤差[cm]
α:角度(こじり)方向誤差[rad]
D:穴の直径[cm]
d:シャフトの直径[cm]
μ:摩擦係数
θ:面取りの角度[deg]
C:隙間比率(D-d)/D
3、机械轴插入力与插入深度的关系图
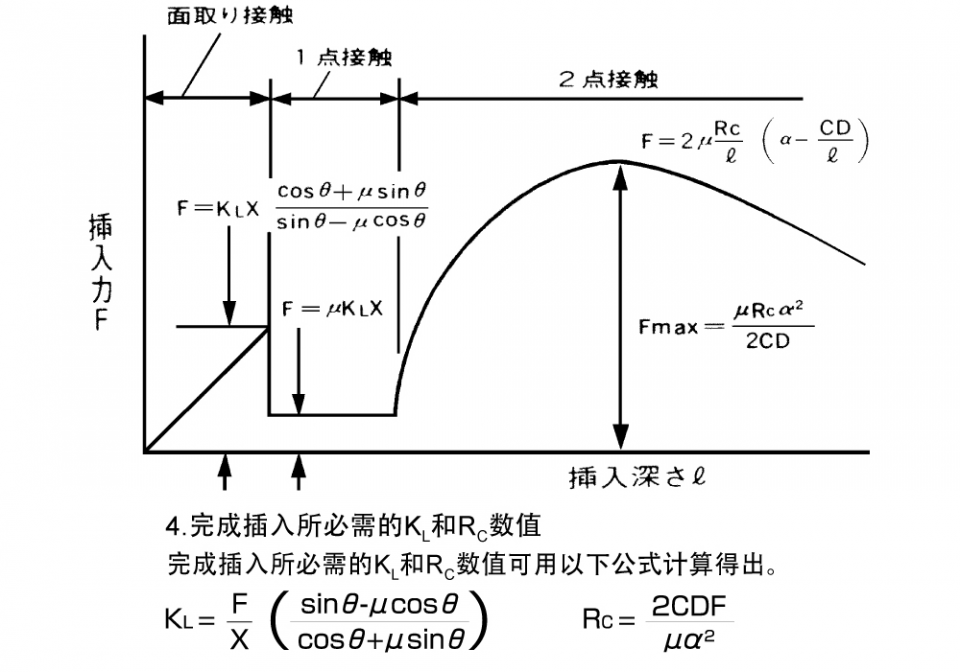
※如果本装置的KL和Rc数值低于用上述公式计算得出的数值(即挠性更大),仍可完成插入作业。在选择本装置时,
请充分比较本装置的尺寸、重量及其他规格,选择*适合使用条件的装置。
主要规格
| 项目目/型号(产品编号) | LUR-111 | LUR-112 | LUR-113 | LUR-211 | |
|---|---|---|---|---|---|
| 允许载荷 | 压缩方向 N(kgf) | 1274(130) | 490(50) | 1274(130) | 1274(130) |
| 拉伸方向 N(kgf) | 137(14) | 137(14) | 225(23) | 137(14) | |
| 可搬运重量(参考)※2 N(kg) | 49(5) | 49(5) | 88(9) | 49(5) | |
| L寸法 mm | 107 | 60 | 55 | 163 | |
| 各方向刚性 | KL:水平(X・Y)方向kgf/cm | 13.2 | 7.6 | 26.8 | 17.9 |
| RC:角度(θ)方向kgf・cm/rad | 4,110 | 1,830 | 6,220 | 4,720 | |
| KA:軸(Z)方向kgf/cm | 2,480 | 900 | 2,990 | 3,210 | |
| RT:旋转(α)方向kgf・cm/rad | 39 | 29 | 105 | 86 | |
| 误差修正值量 | 水平(X・Y)方向 mm | ±2 | |||
| 角度(θ)方向 deg | ±1° | ||||
| 軸(Z)方向mm | ±0.5 | ||||
| 旋转(α)方向 deg | ±6° | ||||
| 产品重量 g | 270 | 380 | |||
| 锁紧机构 | 锁定轴 | 水平方向以及角度方向(处于轴垂直姿势的情况下) | |||
|
用于锁定 的气压孔 |
M3×1本 | ||||
|
用于解锁 的气压孔 |
M3×1本 | ||||
| 作用气压值 Mpa(kgf/cm2) | 0.39〜0.68 (4〜7) | ||||
| 锁定时的重复精度 mm | ±0.1(在轴垂直姿势无负荷的情况下) | ||||
| 使用温度、湿度范围 | 0~55℃、0~90%(无结露) | ||||
| 仕様モデル | LUR-212 | LUR-213 | LUR-321 | |
|---|---|---|---|---|
| 允许载荷 | 圧縮方 N(kgf) | 490(50) | 1274(130) | 2646(270) |
| 引張方向 N(kgf) | 137(14) | 225(23) | 264(27) | |
| 可搬运重量(参考)※2 N(kg) | 49(5) | 88(9) | 98(10) | |
| L寸法 mm | 114 | 107 | 160 | |
| 各方向刚性 | KL:水平(X・Y)方向kgf/cm | 9.8 | 30.4 | 32.1 |
| RC:角度(θ)方向kgf・cm/rad | 2,760 | 7.600 | 20,700 | |
| KA:軸(Z)方向kgf/cm | 1,340 | 3,210 | 5,360 | |
| RT:旋转(α)方向kgf・cm/rad | 63 | 240 | 310 | |
| 误差修正值量 | 水平(X・Y)方向 mm | ±2 | ||
| 角度(θ)方向 deg | ±1° | |||
| 軸(Z)方向mm | ±0.5 | |||
| 旋转(α)方向 deg | ±6° | |||
| 产品重量 g | 380 | 560 | ||
| 锁紧机构 | 锁定轴 | 水平方向以及角度方向(处于轴垂直姿势的情况下) | ||
|
用于锁定 的气压孔 |
M3×1本 | |||
|
用于解锁 的气压孔 |
M3×1本 | |||
| 作用气压值 Mpa(kgf/cm2) | 0.39〜0.68 (4〜7) | |||
| 锁定时的重复精度 mm | ±0.1(在轴垂直姿势无负荷的情况下) | |||
| 使用温度、湿度范围 | 0~55℃、0~90%(无结露) | |||
備考
1.L尺寸是指从末端接头安装面到挠性中心位置的距离。请您在使用时务必使作用点(轴插入时接触点)与挠性中心一致。2.上述的刚性数值是在挠性中心位置的数值。
3.上述误差修正量是单一方向的*大修正量,并不是与其他方向合成的修正量。
4.角度方向偏差的修正值仅适用于在挠性中心位置进行插入作业的情况。
5.板和挡板的材质是铝。
6.本锁紧机构不保持上述的各方向刚性力。抑制RCC设备在移动时的跳动的设备。
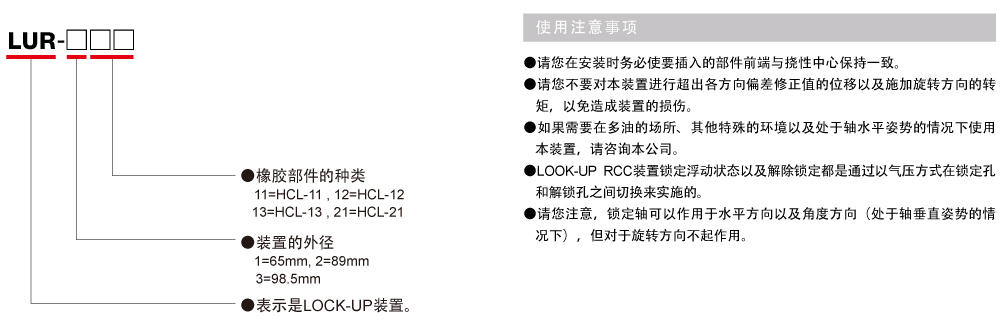
产品编号的编排方法